AirSim:人工势场法避障
目录
参考一些已有的工作,在 AirSim 中实现了基于人工势场法(Artificial Potential Field, APF)和 LQR 控制的无人机避障任务仿真。
势函数与势场
势函数
常见的斥力势函数为 $U_{\rm rep}(P)=\begin{cases} \dfrac 12 \eta(\dfrac{1}{d(P,P_{\rm ob})}-\dfrac 1Q)^2, & d(P,P_{\rm ob})\leq Q \\ 0,& d(P,P_{\rm ob})> Q \end{cases}$
常见的引力势函数为 $U_{\rm att}(P)=\dfrac 12\xi d^2(P,P_{\rm goal})$
$P$ 为无人机当前坐标,$P_{\rm ob}$ 为被计算势函数的障碍物的坐标,$Q$ 为障碍物的作用范围,$P_{\rm goal}$ 为目标点的坐标。
计算方法
计算的方法为对势能计算负梯度得到下降方向,以该方向作为加速度的方向,通过加速度-速度-位置的方法实现控制。具体的计算方法:
程序编写
使用 AirSim 的 Python API 编写仿真程序。程序逻辑如下:
- 在从当前航路点 $W_a$ 前往目标航路点 $W_b$ 的过程中:
- 计算矩阵 $A=\dfrac{1}{\Vert W_a-W_b \Vert^2}\left[I_2-(W_a-W_b)(W_a-W_b)^\top\right]$,其中 $I_2$ 是 2 阶单位矩阵。
- 在每个控制周期 ${\rm d}t$ 内,进行航路点跟踪
- 计算:
- $P_t=P-W_b$,$P$ 为无人机当前位置
- 若未检测到障碍物,则执行航路点跟踪
- $U_1=K_0P_t+K_1AP_t$,其中 $K_0,K_1\in\mathbb{R}$ 是系数
- 对 $U_1$ 进行限幅:若 $\vert U_1\vert > U_{tmax}$,则 $U_1\leftarrow U_{tmax}\frac{U_1}{\vert U_1\vert}$
- 若检测到障碍物,则进行避障
- $U_1=F_{att}+F_{rep}$
- 对 $U_1$ 进行限幅:若 $\vert U_1\vert > U_{amax}$,则 $U_1\leftarrow U_{amax}\frac{U_1}{\vert U_1\vert}$
- $U=\frac{1}{K_2}(U_1-V)$
- 计算:
- 使用 LQR 执行计算得到的期望加速度
- 计算期望速度 $V_{next}=V+U\cdot {\rm d}t$
- 计算期望位置 $P_{next}=U+V_{next}\cdot {\rm d}t$
- 调用 LQR 控制函数,设置期望的位置和速度分别为 $V_{next}, P_{next}$
避障效果测试
使用 AirSim 自带的 Blocks 环境,通过调整起始位置、设置航路点,进行一个简单的避障仿真测试。飞控模式为 simple_flight。无人机的路径如下图:
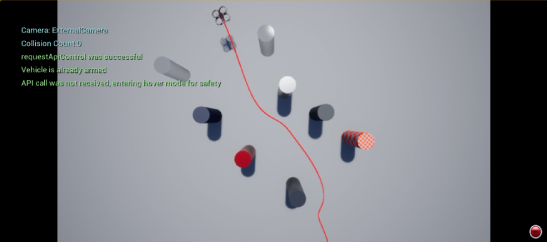
此图为俯视图,无人机从图片下方飞向上方。飞行过程中未发生碰撞(图片左上方显示 Collision Count: 0)。
高速飞行测试
结合毕设的目标(评估飞行平台的计算性能),考虑如何体现计算对该任务的影响。
计算性能会直接影响到计算处理时间。不难想到,若在附近无障碍状态下的飞行速度变快,通过摄像头检测障碍物可用的时间便会变短;若计算时间不足,则无人机可能无法及时检测出障碍物、无法及时作出避障动作。
在上一节中,我们的使用的 $U_{tmax}=3$。我们通过改变无障碍时的速度限幅参数 $U_{tmax}$ 来改变最大幅度限制。当调整 $U_{tmax}=6$ 时,无人机会在飞行过程中与障碍物发生剐蹭。(做这两个视频的时候似乎在用耳机听歌,有一些奇怪的 BGM)
而当 $U_{tmax}=7$ 时,无人机会径直撞上障碍物。
在设想中,算力的提升应该可以允许无人机以更大的速度上限进行无碰撞飞行。在以上实例中,控制周期为 ${\rm d}t=\frac 1f=0.3s$;考虑到算力提升可以支持更高的控制周期,故我尝试调整 ${\rm}t=0.1s$。调整后,无人机确实可以做到以 $U_{amax}=7$ 的条件下无碰撞飞行。然而我在打开 Xbox 录屏程序尝试记录下该过程时,无人机却在飞行过程中发生了碰撞。这说明电脑 CPU 占用导致的算力降低导致了飞行质量的降低,进一步佐证了设想的正确性。在我把 ${\rm d}t$ 调整至 $0.07s$ 后,无人机可在录屏程序开启的前提下实现无障碍飞行了:
接下来,我们尝试将计算程序迁移到其他设备(如 WSL2、树莓派等)上进行硬(软)件在环仿真。
三维 APF 避障
原有的代码基于 LQR + 姿态角控制实现了无人机在水平方向上的避障任务。我采用了几何控制的方法实现了在三维空间中的 APF 避障。
几何控制
输入为期望的无人机位置、姿态、机体角速率 $x_d,R_d,\Omega_d$,输出为无人机的力与力矩 $f,M$。可由 $f, M$ 映射得到四旋翼各个电机的输入 $\sigma_1,\sigma_2,\sigma_3,\sigma_4$,进而通过 AirSim 的电机控制接口client.moveByMotorPWMsAsync进行控制。
避障算法
将原有的 Carrot Chasing 轨迹跟踪及 APF 避障进行了到 3 维的扩展,但并没有局部极小值的处理。在 Blocks 环境中的测试效果如下: